| doc | ||
| src | ||
| .gitignore | ||
| platformio.ini | ||
| Readme.md | ||
Fonctionnement en mode Servo "Classique"
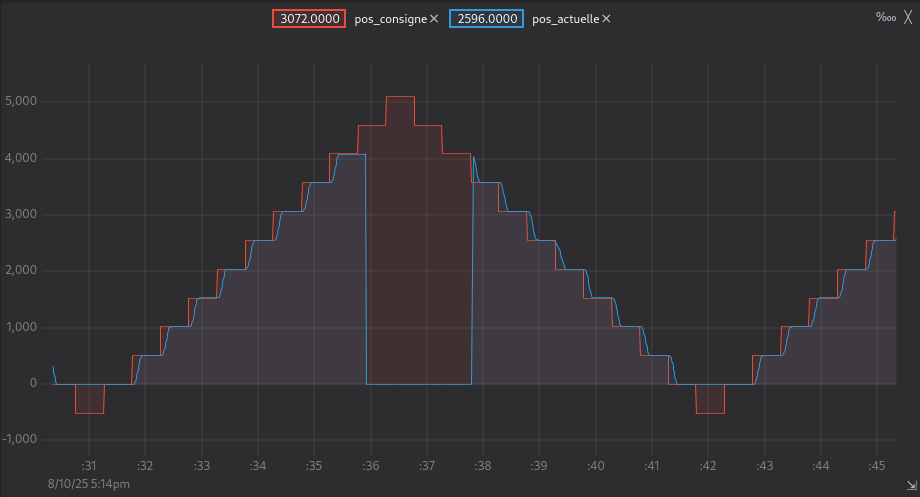
En faisant varier la consigne de position de -512 à 5120, nous observons des butées logicielles à 0 et à 4093. Notons aussi que la position renvoyée peut reboucler à 0 comme indiqué sur le graphique. Nous avons globalement le fonctionnement d'un servomoteur classique, sauf que nous avons le retour de position et que nous pouvons régler également la vitesse.
Voici le graphique obtenu à partir du comportement du servomoteur.